Welcome to advanced-pid’s documentation!
advanced-pid
An advanced PID controller in Python. The derivative term can also be used in practice thanks to built-in first-order filter. Detailed information can be found here.
Usage is very simple:
from advanced_pid import PID
# Create PID controller
pid = PID(Kp=2.0, Ki=0.1, Kd=1.0, Tf=0.05)
# Control loop
while True:
# Get current measurement from system
timestamp, measurement = system.get_measurement()
# Calculate control signal by using PID controller
reference = 1.0
control = pid(timestamp, reference - measurement)
# Feed control signal to system
system.set_input(control)
Complete API documentation can be found here.
Usage
Biggest advantage of advanced-pid, the derivative term has a built-in first-order
filter.
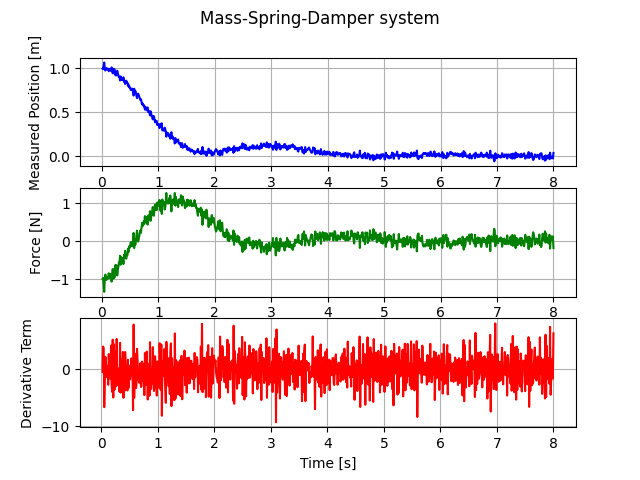
advanced-pid package includes a toy mass-spring-damper system model for testing:
from advanced_pid import PID
from advanced_pid.models import MassSpringDamper
from matplotlib import pyplot as plt
from numpy import diff
# Create a mass-spring-damper system model
system = MassSpringDamper(mass=1.0, spring_const=1.0, damping_const=0.2)
system.set_initial_value(initial_position=1.0, initial_velocity=0.0)
# Create PID controller
pid = PID(Kp=1.0, Ki=0.0, Kd=2.0, Tf=0.5)
# Control loop
time, meas, cont = [], [], []
for i in range(800):
# Get current measurement from system
timestamp, measurement = system.get_measurement()
# Calculate control signal by using PID controller
control = pid(timestamp, -measurement)
# Feed control signal to system
system.set_input(control)
# Record for plotting
time.append(timestamp)
meas.append(measurement)
cont.append(control)
# Plot result
fig, (ax1, ax2, ax3) = plt.subplots(3, 1)
fig.suptitle('Mass-Spring-Damper system')
ax1.set_ylabel('Measured Position [m]')
ax1.plot(time, meas, 'b')
ax1.grid()
ax2.set_ylabel('Force [N]')
ax2.plot(time, cont, 'g')
ax2.grid()
ax3.set_xlabel('Time [s]')
ax3.set_ylabel('Derivative Term')
ax3.plot(time[1:], diff(meas)/diff(time), 'r')
ax3.grid()
plt.show()
As It can be seen in the figure, derivative term cannot be use without a filter:
Installation
To install, run:
pip3 install advanced-pid
Tests
To run tests, run:
python -m unittest tests.test_pid
License
Licensed under the MIT License.
Complete API documentation
- class advanced_pid.PID(Kp, Ki, Kd, Tf)[source]
An advanced PID controller with first-order filter on derivative term.
- Parameters
Kp (float) – Proportional gain.
Ki (float) – Integral gain.
Kd (float) – Derivative gain.
Tf (float) – Time constant of the first-order derivative filter.
- __call__(t, e)[source]
Call integrate method.
- Parameters
t (float) – Current time.
e (float) – Error signal.
- Returns
Control signal.
- Return type
float
- get_gains()[source]
Get PID controller gains.
- Returns
Gains of PID controller (Kp, Ki, Kd, Tf).
- Return type
tuple
- get_initial_value()[source]
Get PID controller states.
- Returns
Initial states of PID controller (t0, e0, i0)
- Return type
tuple
- get_output_limits()[source]
Get PID controller output limits for anti-windup.
- Returns
Output limits (lower, upper).
- Return type
tuple
- integrate(t, e)[source]
Calculates PID controller output.
- Parameters
t (float) – Current time.
e (float) – Error signal.
- Returns
Control signal.
- Return type
float
- set_gains(Kp, Ki, Kd, Tf)[source]
Set PID controller gains.
- Parameters
Kp (float) – Proportional gain.
Ki (float) – Integral gain.
Kd (float) – Derivative gain.
Tf (float) – Time constant of the first-order derivative filter.